High Accuracy Localization and Underwater Communication
Status: AWARD DATE: 4/30/2022
Background:
Wireless remote-operated vehicle (ROV) communications and localization are topics of research in academia and industry due to the challenges the medium imposes on transmission methods. Electromagnetic (EM) waves attenuate severely due to water's high conductivity, while vision-based approaches require line-of-sight and are affected by turbidity.
Acoustic transmissions are currently the dominant technology in use for underwater wireless communications. They can operate at long ranges and can be used for localization. However, they suffer from low data rates, high propagation delay, and high susceptibility to acoustic noise.
Magnetic induction (MI) systems have been proposed as an alternative for underwater localization and communications. MI refers to the near-field component of the magnetic field of a transmitting antenna. Because the field is mostly reactive in this region, it penetrates lossy media better than traditional RF methods that operate in the far field. MI coils are low-cost devices that could enable more widespread use of automated underwater maintenance systems. Besides communication and localization, MI coils can be used to locate metallic structures by sensing the change in the magnetic field caused by the material. This type of detection could help prevent collisions or identify structures.
MI communications do not suffer from propagation delay and do not require line of sight. However, they have a limited range, a low bandwidth, and directional ambiguity. A hybrid method relying on both MI and acoustic transmissions would leverage both technologies' advantages and mitigate the effect of each method's weaknesses.
MI is a promising technology, but research remains to be made to design a performant, reliable device. For example, electromagnetic interferences can affect MI localization and communications. Solutions to reduce the effect of electromagnetic noise must be studied.
Underwater vehicles need high accuracy, short range non-optical localization. Remotely operated vehicles (ROVs) are relied on for subsea inspection, maintenance, and repair of structures where access by human personnel is dangerous. Work on subsea trees requires the ROV to accurately approach and manipulate controls. When the ROV needs to recharge or share high bandwidth information, the ROV must dock with subsea structures. These types of maneuvers require precise localization, which is often performed using cameras and optical tracking. Collisions during these activities are dangerous for both the structure and the ROVs. Optical methods using lasers and/or a visual fiducial system have some limitations, especially in debris-filled or silt-laden water. Additionally, optical systems require a line-of-sight between the sensor and the target.
Competing technologies include acoustic localization and EM-based localization. Acoustic communications are commonly used for long range localization (meter to kilometers), but even the best accuracy of Long-baseline (LBL) systems is in the ±0.01 m range. Acoustic localization is limited by acoustic noise, and many operations (drilling, blowout) are acoustically noisy.
Additional Media Assets:
Industry Impact:
Discussions with commercial advisors helped us outline some of the shortcomings of current EM based localization systems, including low range due to high attenuation and potential interference from metallic structures.
We have conducted preliminary studies on the use of triaxial magnetic induction (MI) coil antennas for localization at short distances between robots. At this range, MI antennas are affordable to produce and deploy (no moving parts), and have strong, high bandwidth signals that do not require line of sight. Their unique capabilities may be particularly suited for missions that require robots to dock with subsea structures.
Project Goals:

This project will focus on magnetic induction (MI) 1) for high-accuracy, short-range, non-optical localization of remotely operated underwater vehicles (ROV), and 2) in conjunction with acoustic modems to optimize communications between a maneuvering ROV and a sensor buoy.
This project proposes to solve several key challenges that need to be investigated to achieve high accuracy underwater localization and performant communication.
MI coils can sense the change in magnetic field distribution caused by metal structures, especially steel and other ferromagnetic materials. These coils can provide an additional sensing modality for structure identification and anti-collision with pipes and other subsea structures. Our proposal will explore this sensing modality.
The proposed project will also theoretically study the use of MI in conjunction with an acoustic system for the communication between ROVs and underwater sensor nodes. The ROV can utilize MI to communicate with nodes close to it, and acoustics to communicate with those further away. In cases where the environment considerably hinders acoustic communication with certain nodes, the AUV can also automatically switch to MI transmissions. This has the potential of speeding up data transfer with a sensor network and reducing mission time or providing increased robustness of data acquisition.
Tasks:
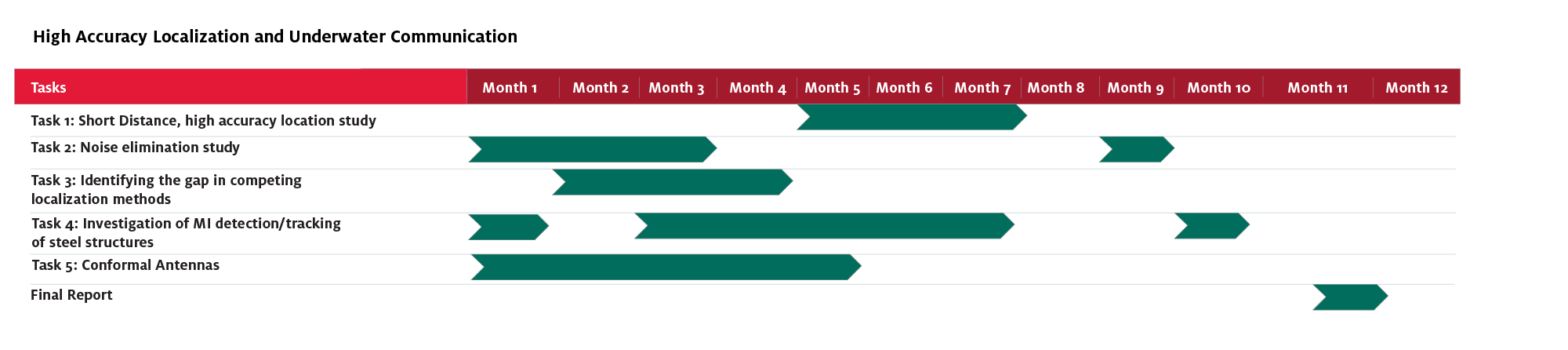
In this project, we propose to explore the design and implementation of a system that enables high-accuracy positioning with ROVs at close distances. Our goal is to produce theoretical and experimental insight towards the use of triaxial coil antennas to aid with subsea docking and localization. This study will test procedures for docking and maneuvering using triaxial magnetic induction. In this 12-month study, we propose to:
- Study short distance, high-accuracy MI-based localization
- Research software and hardware approaches to attenuate EM interference caused by the ROV thrusters and electronics
- Identify limitations of competing optical, acoustic, and RF localization technologies and compare these solutions with the proposed new method
- Investigate MI detection/tracking of steel structures
- Investigate the effect of updating the MI antenna design to be conformal to the frame of an AUV, with the goal of minimizing footprint of the antennas
Gantt Chart:
Highlights:
- Conformal antennas have been constructed, waterproofed, and mounted on the remotely operated vehicle (ROV)
- Multi-feedback bandpass filters work well at specified frequencies for electromagnetic interference (EMI) filtering
- For MI-based Localization, the cable penetrator was fixed to the Doppler Velocity Logger (DVL) so it can be attached to the ROV’s electronics enclosure
- A circuit was designed to oversample a received MI signal. This circuit uses a logarithmic amplifier like our previous approach to deal with the extensive dynamic range
- We implemented Mᴀᴛʟᴀʙ functions that can compute the acoustic absorption coefficient as a function of the frequency and the acoustic path loss as a function of the transmission distance. These functions will be used to help select the most efficient transmission method (e.g. acoustic, MI, frequency range) depending on the distance and environment
Keyfindings:
- Derived methods to estimate relative position and orientation of two sensor systems using only unsigned amplitude measurements.
- Demonstrated that conformal electro-magnetic coils enable longer distance communication with a small impact on robot size and drag.
- Demonstrated image transmission between underwater magnetic induction antennas.
ems to optimize communications between a maneuvering ROV and a sensor buoy.
This project proposes to solve several key challenges that need to be investigated to achieve high accuracy underwater localization and performant communication.
MI coils can sense the change in magnetic field distribution caused by metal structures, especially steel and other ferromagnetic materials. These coils can provide an additional sensing modality for structure identification and anti-collision with pipes and other subsea structures. Our proposal will explore this sensing modality.
The proposed project will also theoretically study the use of MI in conjunction with an acoustic system for the communication between ROVs and underwater sensor nodes. The ROV can utilize MI to communicate with nodes close to it, and acoustics to communicate with those further away. In cases where the environment considerably hinders acoustic communication with certain nodes, the AUV can also automatically switch to MI transmissions. This has the potential of speeding up data transfer with a sensor network and reducing mission time or providing increased robustness of data acquisition.
Tasks:
In this project, we propose to explore the design and implementation of a system that enables high-accuracy positioning with ROVs at close distances. Our goal is to produce theoretical and experimental insight towards the use of triaxial coil antennas to aid with subsea docking and localization. This study will test procedures for docking and maneuvering using triaxial magnetic induction. In this 12-month study, we propose to:
- Study short distance, high-accuracy MI-based localization
- Research software and hardware approaches to attenuate EM interference caused by the ROV thrusters and electronics
- Identify limitations of competing optical, acoustic, and RF localization technologies and compare these solutions with the proposed new method
- Investigate MI detection/tracking of steel structures
- Investigate the effect of updating the MI antenna design to be conformal to the frame of an AUV, with the goal of minimizing footprint of the antennas
Gantt Chart:
Highlights:
- Conformal antennas have been constructed, waterproofed, and mounted on the remotely operated vehicle (ROV)
- Multi-feedback bandpass filters work well at specified frequencies for electromagnetic interference (EMI) filtering
- For MI-based Localization, the cable penetrator was fixed to the Doppler Velocity Logger (DVL) so it can be attached to the ROV’s electronics enclosure
- A circuit was designed to oversample a received MI signal. This circuit uses a logarithmic amplifier like our previous approach to deal with the extensive dynamic range
- We implemented Mᴀᴛʟᴀʙ functions that can compute the acoustic absorption coefficient as a function of the frequency and the acoustic path loss as a function of the transmission distance. These functions will be used to help select the most efficient transmission method (e.g. acoustic, MI, frequency range) depending on the distance and environment
Keyfindings:
- Derived methods to estimate relative position and orientation of two sensor systems using only unsigned amplitude measurements.
- Demonstrated that conformal electro-magnetic coils enable longer distance communication with a small impact on robot size and drag.
- Demonstrated image transmission between underwater magnetic induction antennas.